面白いのでどんどん読んでいる。
 実践 コンピュータビジョン
実践 コンピュータビジョン4章はピンホールカメラモデルを使って拡張現実の基礎っぽいあたりを静止画像に対してやっている。つづいて5章では多視点の幾何に移っていくが、こっちはあまり興味が沸かなかったのでとりあえず読み流した。
4章はもうちょっとサンプル的に面白いものを選択して欲しかった。よくあるOpenGLのティーポットが乗っかっててもなぁ。あとで自分でいじってみてなんか他のものをあわせてみる。こびとのモデルとかあればいいんだけど。
6章からは画像のクラスタリングの話に移って、7章で検索、8章が画像認識、9章が領域分割なので6-9がひとまとまりだと思うけど、今日は6章までしか読んでない。K-meansとスペクトラルクラスタリングというオーソドックスな手法。 K-meansはあちこちに分かりやすい説明(これとか)があるけどスペクトラルクラスタリングは本書の説明だけではわかりにくいかもしれないので、きちんと理解したければ「Rで学ぶクラスタ解析」をよめばよい。
 Rで学ぶクラスタ解析
Rで学ぶクラスタ解析SciPyでK-meansって初めて書いたけど、わかりやすかった。
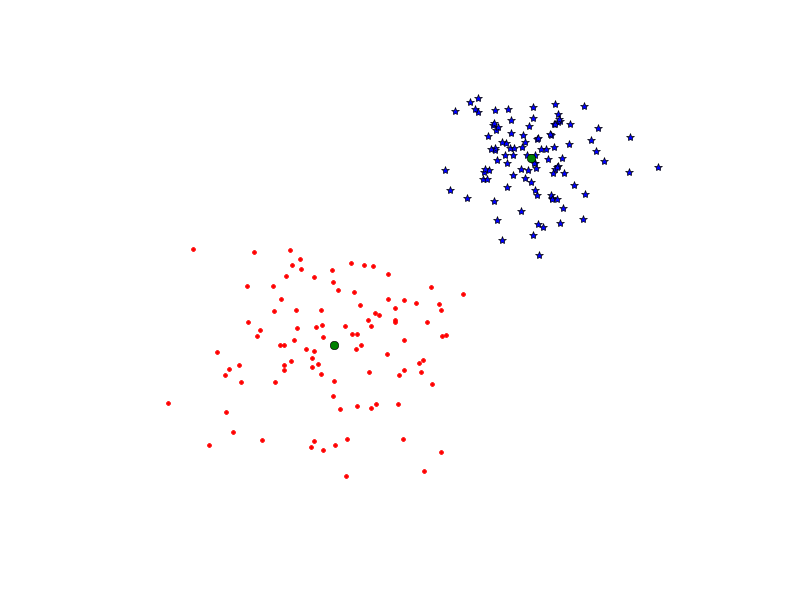
from scipy.cluster.vq import * from pylab import * import numpy as np # サンプルデータを作成 class1 = 1.5 * np.random.randn(100, 2) class2 = np.random.randn(100, 2) + np.array([5,5]) features = np.vstack((class1, class2)) # 分類 centroids, variances = kmeans(features, 2) code, distances = vq(features, centroids) # 可視化 figure() ndx = where(code==0)[0] plot(features[ndx,0], features[ndx,1], '*') ndx = where(code==1)[0] plot(features[ndx,0], features[ndx,1], 'r.') plot(centroids[:,0], centroids[:,1], 'go') axis('off') show()
出来た図